It is viewed that the
MMV model is an special case of the
dynamic sparse model, and thus some people probably believe that algorithms for the MMV model may not be suitable for the dynamic sparse model. Here I'll give an experiment to show that it is not the case. It is more probably that algorithms for the MMV model is more suitable for the dynamic sparse model.
First, I'll give the necessary background on the two models.
The MMV model (i.e. multiple measurement vector model) is an extension of the basic compressed sensing model. It is expressed as:
Y = AX + V,
where Y is the N by L measurement matrix (known), A is the N by M dictionary matrix (known), and X is the unknown M by L coefficient matrix (unknown). V is the unknown noise matrix. Clearly, when L=1, the model is the basic compressed sensing model (the model from which the Lasso, Basis Pursuit, Matching Pursuit and other numerous algorithms were derived). In the MMV model, a key assumption is that there are few nonzero rows in X (i.e.
the common sparsity assumption). It is worthy mentioning that under mild conditions algorithms' recovery performance is exponentially increased with increasing L (i.e. the number of measurement vectors). And in many applications (such as MRI image series processing, Source localization, etc) we can always obtain several or many measurement vectors. Many algorithms have been proposed, such as M-SBL [1] (assuming each row in X has no temporal correlation) and T-SBL/T-MSBL [2] (assuming each row in X could have temporal correlation).
However, in applications we cannot ensure all the column vectors in X have the same support (i.e. indexes of the nonzero elements in a column vector). It is more probably that the support of columns is slowly changing, i.e. the columns in X have time-varying sparsity patterns. This model is generally called the
dynamic sparse model. Several algorithms have been proposed, such as the Kalman Filtered Based Compressed Sensing (KF-CS) [3], Least-Square Compressed Sensing (LS-CS) [4], and the algorithm based on Belief Propagation [5].
Since the common sparsity assumption in the MMV model is not satisfied in the dynamic sparse model, one may think that algorithms derived in the MMV model may not be suitable for the dynamic sparse model. However, as long as the number of total nonzero rows in X is not too many (e.g. less than (N+L)/2 [6]), MMV algorithms can be used for the dynamic sparse model, and even have better performance.
Here is an experiment, which compares the M-SBL, KF-CS and LS-CS. The simulation data and the KF-CS and LS-CS codes all come from the author's website: http://home.engineering.iastate.edu/~namrata/research/LSCS_KFCS_code.zip. The M-SBL code comes from my website: http://dsp.ucsd.edu/~zhilin/ARSBL_1p2.zip.
I directly used the data generated by the m-file:
runsims_final.m in the
LSCS_KFCS_code.zip downloaded via the above link, and used the original matlab command to call KF-CS and LS-CS algorithms, i.e:
[x_upd,T_hat] = kfcs_full(y,Pi0,A,Q,R)
[x_upd_lscs,T_hat_lscs,x_upd_csres] = lscs_full(y,Pi0,A,Q,R);
This commands were given by the author. I didn't change anything.
The command to call M-SBL is given by:
[x_sbl,gamma,gamma_used,k] = MSBL(A, y, R(1,1), 0, 1e-4, 1000, 0);
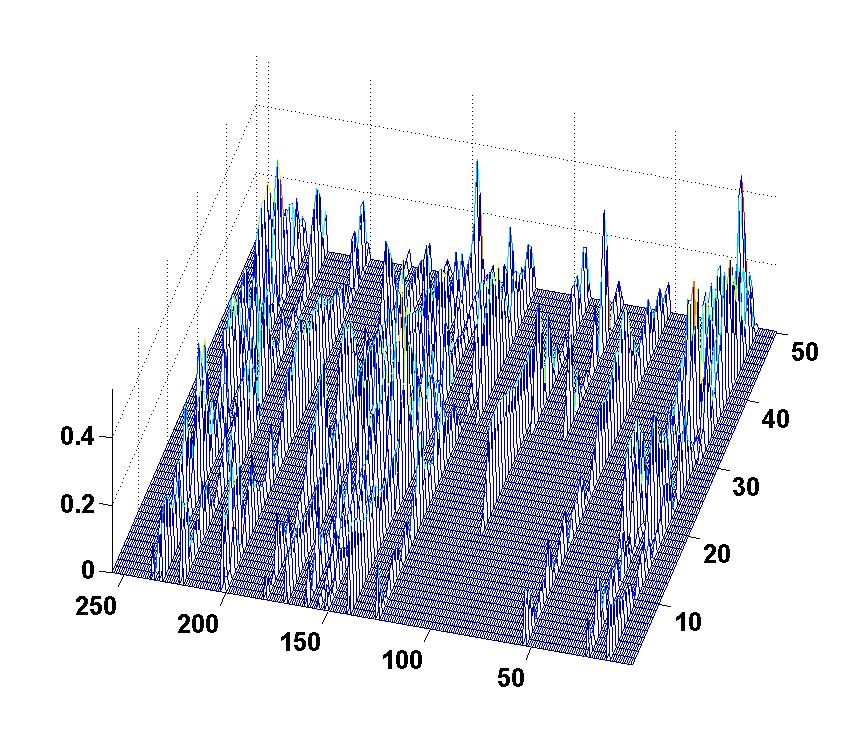
Experiment was repeated for 63 trials. The averaged results (from Time 0 to Time 60) are shown in the following pic (click the pic for large view):
Here we can see, both KF-CS and LS-CS have large errors when the sparsity profile of the columns in X changes (indicated by the four large bumps). In contrast, M-SBL does not have this phenomenon and has much small errors in most duration. KF-Genie indicates the Kalman-Filter estimation when the support of each column in X is known.
The averaged elapse time is (in my notebook):
KF-CS is
168.5 seconds
LS-CS is
168.3 seconds
M-SBL is
19.7 second
I have to emphasize, if we segment the whole data into several shorter segments, and then perform M-SBL on each segment and concatenate the results from each segment, we can get better performance.
So, the conclusion is,
the MMV model has great potential for the problem of time-varying sparsity patterns. This is somewhat like that people generally view each short segment of a nonstationary signal as a stationary signal. So,
viewing a time-varying sparsity model as concatenation of several MMV models is probably a better way to solve the time-varying sparsity model.
Some of the results can be found in [7].
Reference:
[1] D.P. Wipf and B.D. Rao, An Empirical Bayesian Strategy for Solving the Simultaneous Sparse Approximation Problem, IEEE Transactions on Signal Processing, vol. 55, no. 7, July 2007
[2] Z.Zhang, B.D.Rao, Sparse Signal Recovery with Temporally Correlated Source Vectors Using Sparse Bayesian Learning, accepted by IEEE Journal of Selected Topics in Signal Processing, [
arXiv:1102.3949]
[3] Namrata Vaswani, Kalman Filtered Compressed Sensing, IEEE Intl. Conf. Image Proc. (ICIP), 2008
[4] Namrata Vaswani, "LS-CS-residual (LS-CS): Compressive Sensing on the Least Squares Residual", IEEE Trans. Signal Processing, August 2010
[5] J.Ziniel, L.C.Potter, P.Schniter, Tracking and smoothing of time-varying sparse signals via approximate belief propagation, Asilomar 2010
[6] SF Cotter, BD Rao, Sparse solutions to linear inverse problems with multiple measurement vectors, IEEE Trans. on Signal Processing, 2005







{kind=link}